
Get OMG-OCUP2-FOUND100 Exam Practice Questions - Real and Updated
OMG Certified UML Professional 2 (OCUP 2) - Foundation Level Exam Dumps
Last Updated : Jul 10, 2026
Total Questions : 90
This Bundle Pack includes Following 3 Formats
Desktop Practice
Test software
Test software
Web Based
Practice Test
Practice Test
Questions &
Answers (PDF)
Answers (PDF)
OMG-OCUP2-FOUND100 Desktop Practice
Test Software
Last Updated : Jul 10, 2026
Total Questions : 90
Total Questions : 90
$59.00

OMG-OCUP2-FOUND100 Questions & Answers
(PDF)
Last Updated : Jul 10, 2026
Total Questions : 90
Total Questions : 90
$59.00

OMG-OCUP2-FOUND100 Web Based Self Assessment Practice Test
Last Updated : Jul 10, 2026
90 Total Questions
Supported Browsers
Supported Platforms
License Options
$59.00
Following are some OMG-OCUP2-FOUND100 Exam Questions for Review
Choose the correct answer:
Which statement is correct about Activity precondition and postcondition constraints?
Choose the correct answer:
Consider the following diagram:
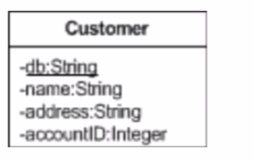
According to the diagram, which statement describes the property db?
Choose the correct answer:
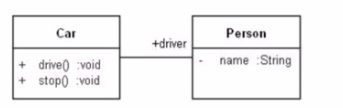
Which elements in the diagram are Features of the Car class?
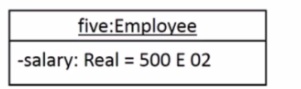
Choose the correct answer:
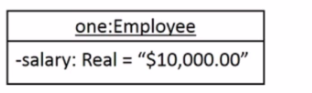
Which object has the highest value that is properly assigned to a salary slot?
A)
B)
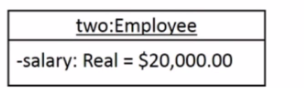
C)
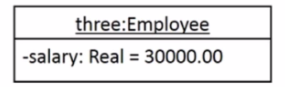
D)
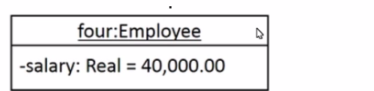
E)
Choose the correct answer:
What is an advantage of modeling as a part of the software analysis and design process?
Unlock All Features of OMG-OCUP2-FOUND100 Dumps Software
Just have a look at the best and updated features of our OMG-OCUP2-FOUND100 dumps which are described in detail in the following tabs. We are very confident that you will get the best deal on this platform.
Select Question
Types you want
Types you want
Set your desired
pass percentage
pass percentage
Allocate Time
(Hours: Minutes)
(Hours: Minutes)
Create Multiple
Practice test with
limited questions
Practice test with
limited questions
Customer
Support
Support
Latest Success Metrics For actual OMG-OCUP2-FOUND100 Exam
This is the best time to verify your skills and accelerate your career. Check out last week's results, more than 90% of students passed their exam with good scores. You may be the Next successful Candidate.
95%
Average Passing Scores in final Exam
91%
Exactly Same Questions from these dumps
90%
Customers Passed OMG-OCUP2-FOUND100 exam













